Robotic Hand Control Innovations: Challenges and Solutions

- Authors
- Published on
- Published on
In this thrilling episode with Jeff the G1, we witness the incredible capabilities of robotic technology. By utilizing a keyboard, Jeff demonstrates the precise control over the robot's hand movements, showcasing the ability to move in various directions. However, the challenge arises when attempting to control all seven motors in the robot's arm due to limitations in the SDK, leading to the need for joint-level control rather than Cartesian control.
The real excitement kicks in when Jeff sets his sights on a monumental task: retrieving a $65,000 bottle of bubbly water from the kitchen using the robot. Despite the advancements in locomotion and occupancy grid, the lack of high-level control for the hands presents a significant hurdle. Jeff contemplates the use of reinforcement learning and simulation to tackle this complex problem, highlighting the intricate balance between supervised and unsupervised approaches in training the robot.
Undeterred by the challenges, Jeff embarks on a unique strategy of training the robot through manual demonstration, showcasing the power of ground truth data in teaching the robot various actions. This method proves surprisingly effective, requiring minimal samples to achieve impressive results. Alongside these technical feats, Jeff shares his astonishment at the widespread interest in G1 robots, with many individuals, including non-programmers, expressing enthusiasm for these humanoid machines. Through meticulous testing and adjustments, Jeff refines the robot's capabilities, addressing issues such as occupancy grid accuracy and battery percentage display, while also implementing features like faster walking speed and an emergency stop function for enhanced control.
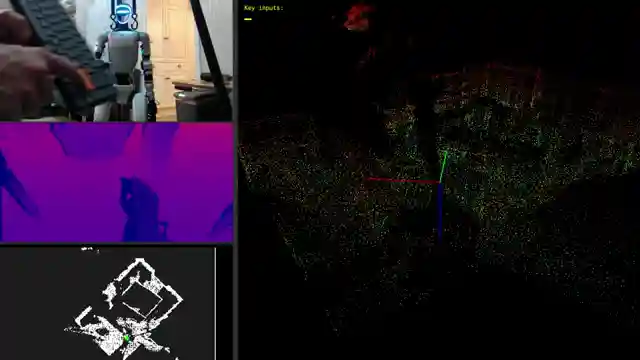
Image copyright Youtube
Image copyright Youtube
Image copyright Youtube
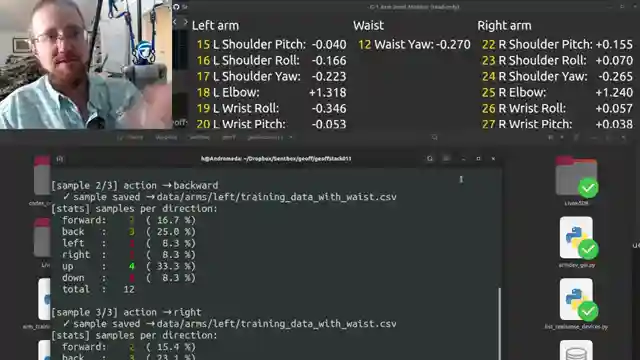
Image copyright Youtube
Watch Unitree G1 - Moving the arms/hands - Dev w/ G1 Humanoid P.3 on Youtube
Viewer Reactions for Unitree G1 - Moving the arms/hands - Dev w/ G1 Humanoid P.3
Viewer praises the series as their favorite in the last 5 years
Appreciation for the use of AI as a learning tool
Excitement for the series and sharing with others
Interest in inverse kinematics and its applications in animation
Praise for the sample creation pipeline
Suggestions for improving the learning process with the robot
Mention of the importance of specialized, task-focused robots
Recommendation for using inverse kinematics in game development
Interest in attaching a speaker to the robot
Suggestion to use machine learning for motion capture and rigging
Related Articles
Robotic Hand Control Innovations: Challenges and Solutions
Jeff the G1 demonstrates precise robotic hand control using a keyboard. Challenges with SDK limitations lead to innovative manual training methods for tasks like retrieving a $65,000 bottle of water. Improved features include faster walking speed and emergency stop function.

Enhanced Robotics: Jeff the G1's Software Upgrades and LiDAR Integration
sentdex showcases upgrades to Jeff the G1's software stack, including RGB cameras, lidar for 3D mapping, and challenges with camera positioning and Ethernet connectivity. Embracing simplicity with Kiss ICP and Open3D, they navigate LiDAR integration for enhanced robotic exploration.

Unitry G1 Edu Ultimate B Review: Features, Pricing, and Development Potential
Explore the Unitry G1 edu Ultimate B humanoid robot in this in-depth review by sentdex. Discover its features, pricing, and development potential.

Unlocking Vibe Coding: Robot Hand Gestures and Version Control Explained
Explore the world of Vibe coding with sentdex as they push the boundaries of programming using language models. Discover the intricacies of robotic hand gestures and the importance of version control in this engaging tech journey.